本文最后更新于135 天前,其中的信息可能已经过时,如有错误请发送邮件到big_fw@foxmail.com
一、参数修改
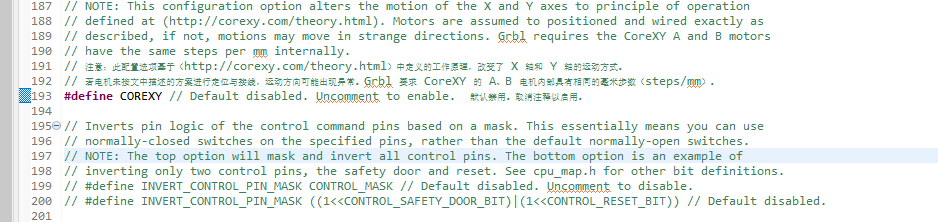
grbl源码中,默认不是使用CoreXY结构的,需要在config.h文件中取消CoreXY的注释,如下:
然后是defaults.h中的参数配置,我是直接修改的DEFAULTS_GENERIC,要是想也可以自己单独写一个参数配置
原来的参数如下:
#ifdef DEFAULTS_GENERIC
// Grbl generic default settings. Should work across different machines.
#define DEFAULT_X_STEPS_PER_MM 250.0
#define DEFAULT_Y_STEPS_PER_MM 250.0
#define DEFAULT_Z_STEPS_PER_MM 250.0
#define DEFAULT_X_MAX_RATE 500.0 // mm/min
#define DEFAULT_Y_MAX_RATE 500.0 // mm/min
#define DEFAULT_Z_MAX_RATE 500.0 // mm/min
#define DEFAULT_X_ACCELERATION (10.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^2
#define DEFAULT_Y_ACCELERATION (10.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^2
#define DEFAULT_Z_ACCELERATION (10.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^2
#define DEFAULT_X_MAX_TRAVEL 200.0 // mm NOTE: Must be a positive value.
#define DEFAULT_Y_MAX_TRAVEL 200.0 // mm NOTE: Must be a positive value.
#define DEFAULT_Z_MAX_TRAVEL 200.0 // mm NOTE: Must be a positive value.
#define DEFAULT_SPINDLE_RPM_MAX 1000.0 // rpm
#define DEFAULT_SPINDLE_RPM_MIN 0.0 // rpm
#define DEFAULT_STEP_PULSE_MICROSECONDS 10
#define DEFAULT_STEPPING_INVERT_MASK 0
#define DEFAULT_DIRECTION_INVERT_MASK 0
#define DEFAULT_STEPPER_IDLE_LOCK_TIME 25 // msec (0-254, 255 keeps steppers enabled)
#define DEFAULT_STATUS_REPORT_MASK 1 // MPos enabled
#define DEFAULT_JUNCTION_DEVIATION 0.01 // mm
#define DEFAULT_ARC_TOLERANCE 0.002 // mm
#define DEFAULT_REPORT_INCHES 0 // false
#define DEFAULT_INVERT_ST_ENABLE 0 // false
#define DEFAULT_INVERT_LIMIT_PINS 0 // false
#define DEFAULT_SOFT_LIMIT_ENABLE 0 // false
#define DEFAULT_HARD_LIMIT_ENABLE 0 // false
#define DEFAULT_INVERT_PROBE_PIN 0 // false
#define DEFAULT_LASER_MODE 0 // false
#define DEFAULT_HOMING_ENABLE 0 // false
#define DEFAULT_HOMING_DIR_MASK 0 // move positive dir
#define DEFAULT_HOMING_FEED_RATE 25.0 // mm/min
#define DEFAULT_HOMING_SEEK_RATE 500.0 // mm/min
#define DEFAULT_HOMING_DEBOUNCE_DELAY 250 // msec (0-65k)
#define DEFAULT_HOMING_PULLOFF 1.0 // mm
#endif修改后
#ifdef DEFAULTS_GENERIC
// Grbl generic default settings. Should work across different machines.
#define DEFAULT_X_STEPS_PER_MM 80.0 //步进电机每毫米步数
#define DEFAULT_Y_STEPS_PER_MM 80.0
#define DEFAULT_Z_STEPS_PER_MM 80.0
#define DEFAULT_X_MAX_RATE 3000.0 // mm/min //最大移动速度
#define DEFAULT_Y_MAX_RATE 3000.0 // mm/min
#define DEFAULT_Z_MAX_RATE 1000.0 // mm/min
#define DEFAULT_X_ACCELERATION (300.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^ //加速度
#define DEFAULT_Y_ACCELERATION (300.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^2
#define DEFAULT_Z_ACCELERATION (100.0*60*60) // 10*60*60 mm/min^2 = 10 mm/sec^2
#define DEFAULT_X_MAX_TRAVEL 200.0 // mm NOTE: Must be a positive value. //最大行程
#define DEFAULT_Y_MAX_TRAVEL 180.0 // mm NOTE: Must be a positive value.
#define DEFAULT_Z_MAX_TRAVEL 200.0 // mm NOTE: Must be a positive value.
#define DEFAULT_SPINDLE_RPM_MAX 1000.0 // rpm
#define DEFAULT_SPINDLE_RPM_MIN 0.0 // rpm
#define DEFAULT_STEP_PULSE_MICROSECONDS 10 //步进脉冲设置
#define DEFAULT_STEPPING_INVERT_MASK 0
#define DEFAULT_DIRECTION_INVERT_MASK 0
#define DEFAULT_STEPPER_IDLE_LOCK_TIME 250 // 步进电机空闲锁定时间
#define DEFAULT_STATUS_REPORT_MASK 1 // MPos enabled
#define DEFAULT_JUNCTION_DEVIATION 0.01 // mm
#define DEFAULT_ARC_TOLERANCE 0.001 // mm
#define DEFAULT_REPORT_INCHES 0 // false
#define DEFAULT_INVERT_ST_ENABLE 1 // false
#define DEFAULT_INVERT_LIMIT_PINS 1 // false // 启用软限位保护
#define DEFAULT_SOFT_LIMIT_ENABLE 0 // false // 禁用硬限位
#define DEFAULT_HARD_LIMIT_ENABLE 0 // false
#define DEFAULT_INVERT_PROBE_PIN 0 // false
#define DEFAULT_LASER_MODE 0 // false
#define DEFAULT_HOMING_ENABLE 0 // false
#define DEFAULT_HOMING_DIR_MASK 0 // move positive dir
#define DEFAULT_HOMING_FEED_RATE 25.0 // mm/min
#define DEFAULT_HOMING_SEEK_RATE 500.0 // mm/min
#define DEFAULT_HOMING_DEBOUNCE_DELAY 250 // msec (0-65k)
#define DEFAULT_HOMING_PULLOFF 1.0 // mm
#endif要说的点是DEFAULT_X_STEPS_PER_MM和DEFAULT_Y_STEPS_PER_MM这两个参数,是根据自己步进电机的步进细分、同步轮齿数和同步带齿距。
比如我的步进电机的步距角1.8度,即200步/转,用的16细分,那么每转步数 = 200 X 16 = 3200 步/转
我的同步轮为20T(20齿),同步带2GT(齿距2mm),皮带轮周长 = 齿距 x 齿数 = 2mm X 20 = 40 mm
那么Steps/mm (步进电机每毫米步数) = 每转步数 / 皮带轮周长 = 3200 / 40 = 80 steps/mm
所以X、Y的X_STEPS_PER_MM为80
二、下载调试
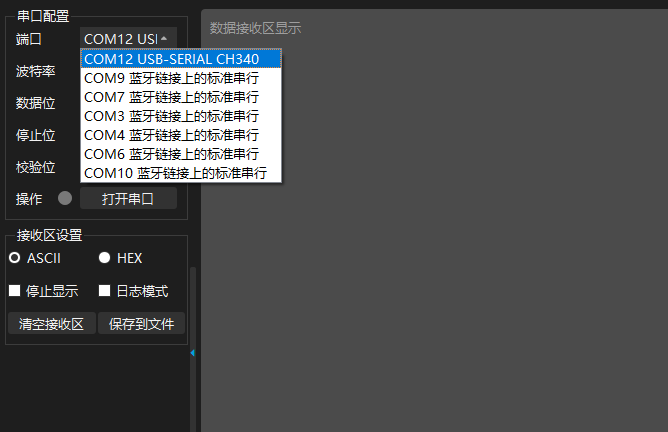
先打开串口助手,串口助手都差不多,找一个能用的就行,我这里使用的是野火的串口调试助手。
因为使用的是CH340,需要安装CH340的驱动,网上大把
连接串口
因为grbl是检测/n结尾的,所以每个命令都要有/n(换行)结尾
野火的串口助手可以设置默认发送一个新行,所以我测试的时候就不需要加/n
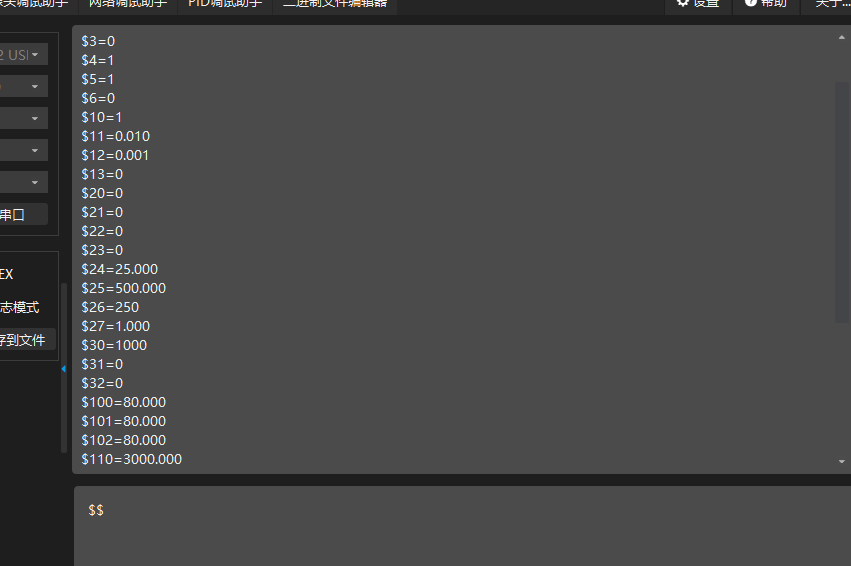
发送$$可以查看grbl的配置信息
发送$?可以查看当前运行状态
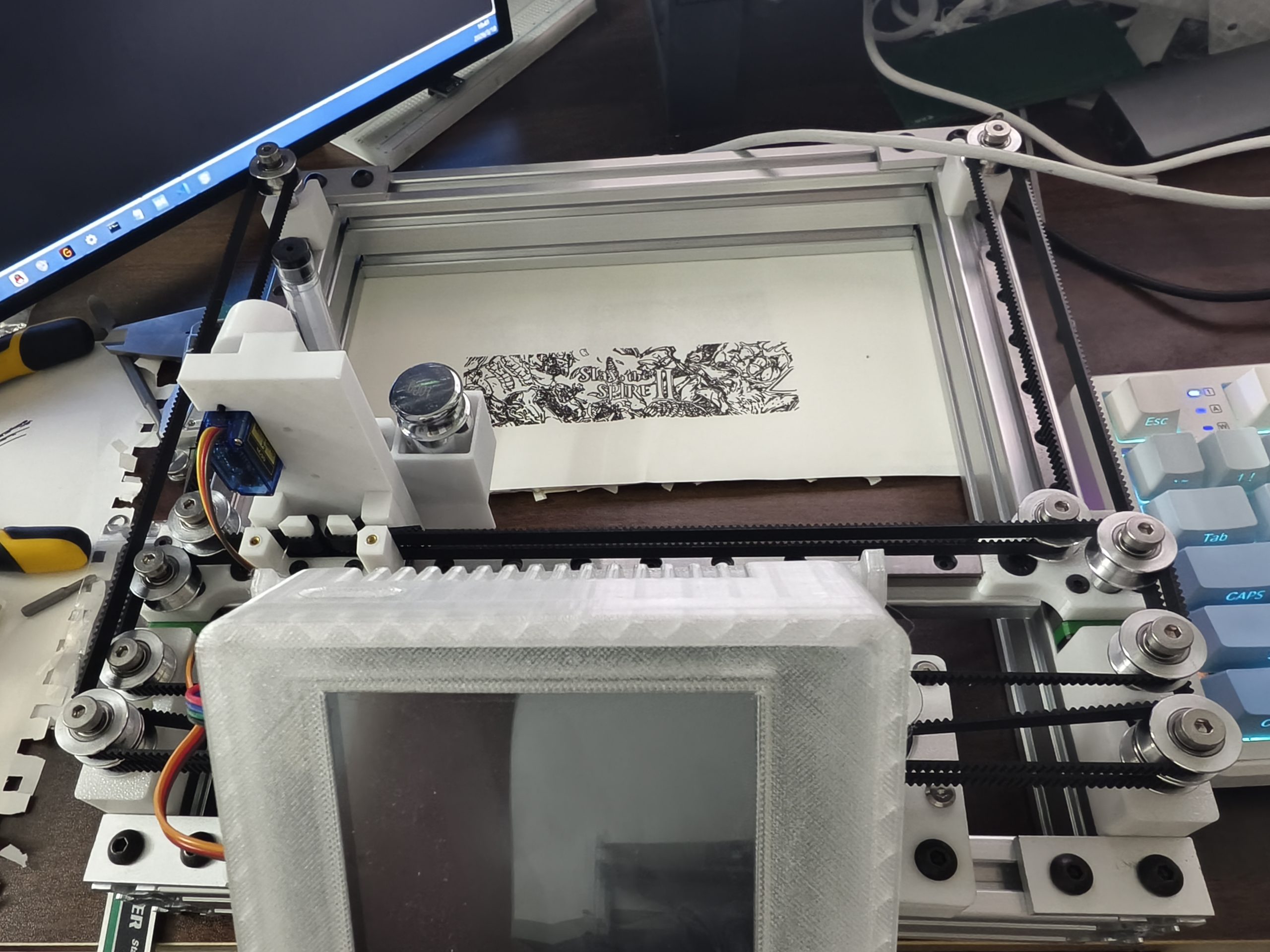
发送如下命令
G0 Z-5
G0 X50
G0 Z5
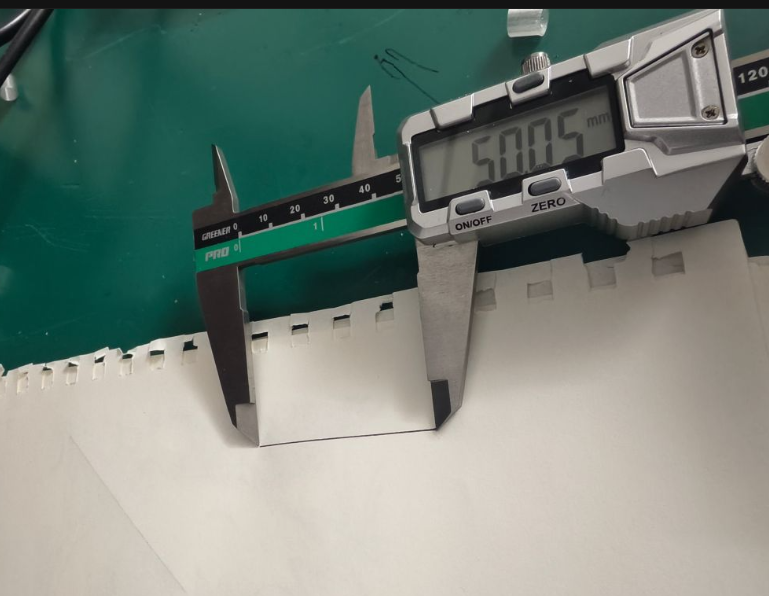
可以看到沿X轴(向右)移动了50mm