本文最后更新于22 天前,其中的信息可能已经过时,如有错误请发送邮件到big_fw@foxmail.com
一、任务调度器
调度器就是使用相关的调度散发来决定当前需要执行的任务
FreeRTOS一共有三种任务调度方式:
- 抢占式调度
- 时间片调度
- 协程式调度
抢占式调度:针对优先级不同的任务,每个任务都有一个优先级,优先级高的任务抢占优先级低的任务(FreeRTOS中,数值越大优先级越大)。
时间片调度:针对优先级相同的任务,当多个任务的优先级相同时,任务调度器会在每一次系统时钟节拍到的时候切换任务。
协程式调度:当前执行任务将会一直运行,同时高优先级的任务不会抢占低优先级任务。(官方已经明确表示不会再更新协程式调度,简单了解即可)
二、任务状态
FreeRTOS中存在4种任务状态:
- 运行态
- 就绪态
- 阻塞态
- 挂起态
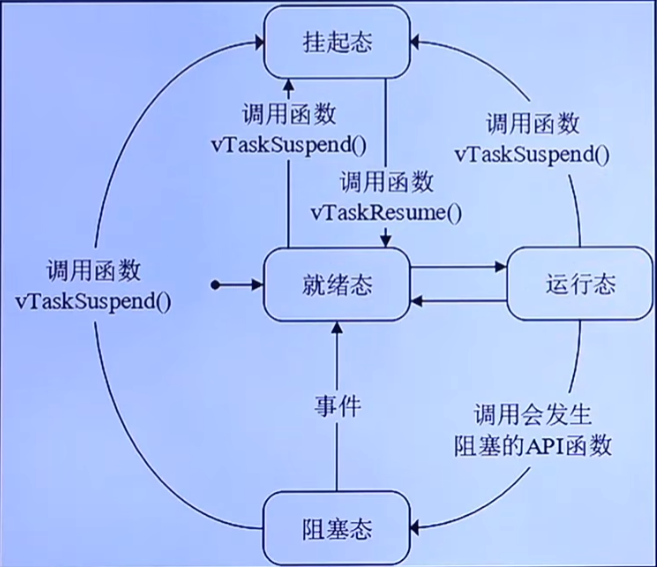
运行态:正在执行的任务,该任务就处于运行态,在STM32中,同一时间仅一个任务处于运行态
就绪态:如果该任务已经能够执行,但当前还未被执行,那么该任务处于就绪态
阻塞态:如果一个任务因延时或等待外部事件发生,那么这个任务就处于阻塞态
挂起态:类似暂停,调用函数vTaskSuspend()进入挂起态,需要调用解挂函数vTaskResume()才可以进入就绪态
四种任务状态之间的转换图: