本文最后更新于435 天前,其中的信息可能已经过时,如有错误请发送邮件到big_fw@foxmail.com
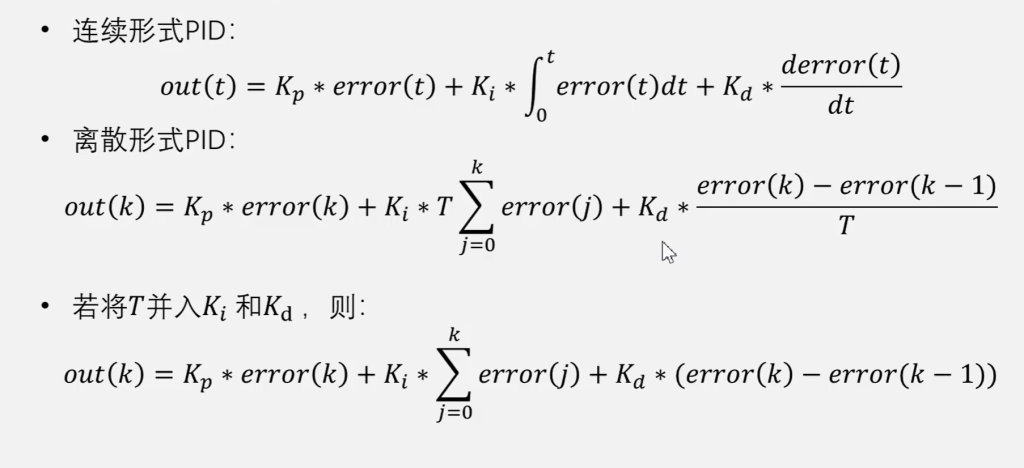
连续形式PID,需要用模拟电路来实现
对于单片机来说,则需要用离散形式PID
离散后,单片机需要设定一个调控周期T,单片机每隔T时间,才会进行一次PID计算和调控
位置式PID与增量式PID
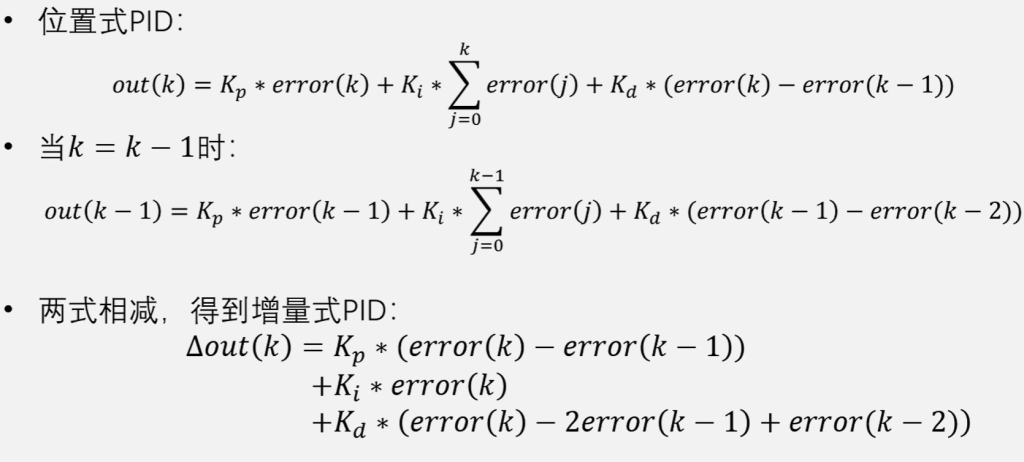
位置式PID与增量式PID比较
- 位置式PID有连续形式PID直接离散得到,每次计算得到的是全量的输出值,可以直接给被控对象
- 增量式PID由位置式PID推导得到,每次计算得到的是输出值的增量,如果直接给被控对象,则需要被控对象内部有积分功能
- 增量式PID也可在控制器内进行积分,然后输出积分后的结果,此时增量式PID与位置式PID整体功能没有区
- 位置式PID和增量式PID计算时产生的中间变量不同,如果对这些变量加以调节,可以实现不同的特性
PID程序实现
- 确定一个调控周期T,每隔时间T,程序执行一次PID调控