本文最后更新于338 天前,其中的信息可能已经过时,如有错误请发送邮件到big_fw@foxmail.com
PID简介
- PID是比例(Proportional)、积分(Integral)、微分(Differential)的缩写
- PID是一种闭环控制算法,它能动态改变施加到被控对象的输出值(Out),使得被控对象某一物理量的实际值(Actual),能够快速、准确、稳定地跟踪到指定的目标值(Target)
- PID是一种基于误差调控的算法,其中规定:误差=目标值-实际值,PID的任务是使误差始终为0
- PID对被控对象模型要求低,无需建模
开环和闭环
要像了解PID,就先要了解什么是开环和闭环
- 开环:控制器单向输出值给被控对象,不获取被控对象的反馈、控制器对被控对象的执行状态不清楚

- 闭环:控制器输出值给被控对象,同时获取被控对象的反馈,控制器知道被控对象的执行状态,可以根据反馈修改输出值以优化控制

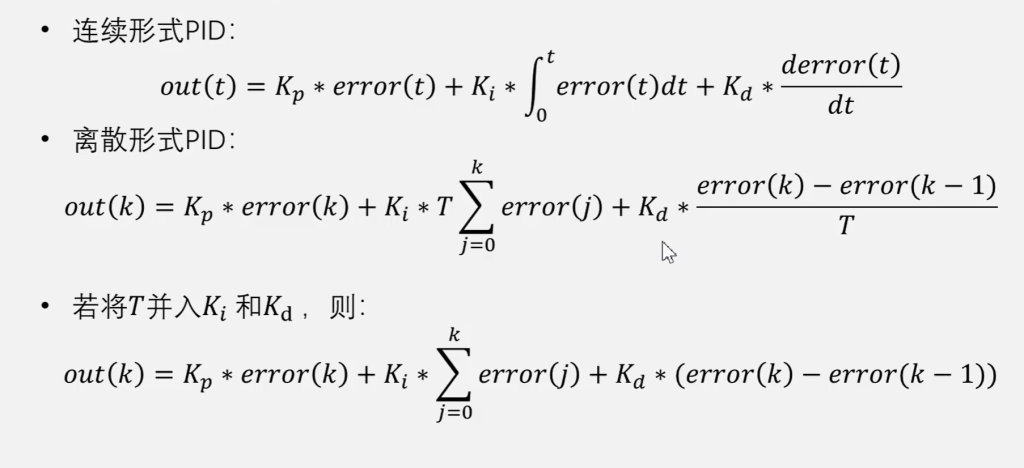
PID公式与系统框图
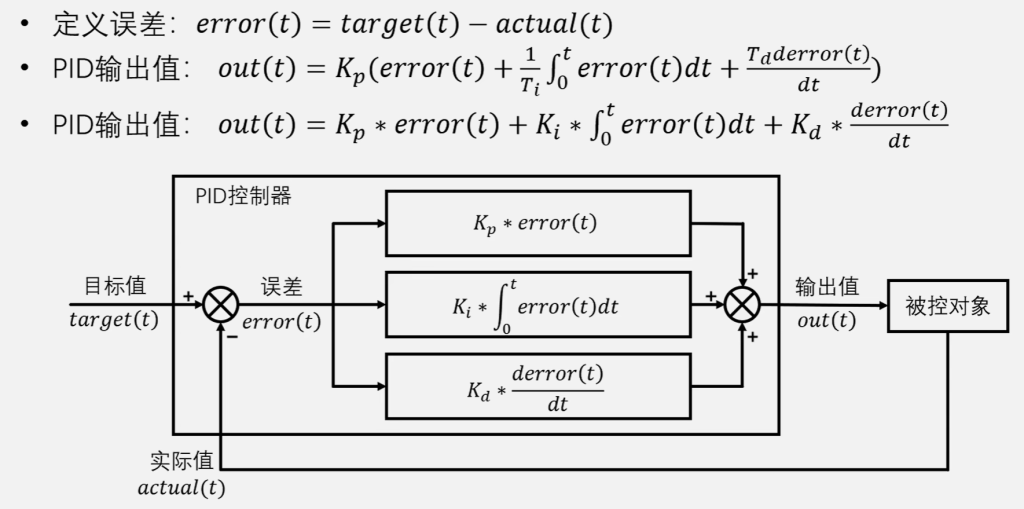
Kp为比例系数
Ti(Ki)为积分时间常数
Td(Kd)为微分时间常数
上面的第二个公式中,如果改变Kp会影响后面两个参数,所以一般采用第三个公式,便于参数调节
即Kp、Ki = Kp/Ti、Kd = Kd*Kp
Kp调节第一项(P)
Ki调节第二项 (I)
Kd调节第三项(D)
比例项(P)
只含有比例项的PID输出值:

- 比例项的输出值仅取决于当前时刻的误差,与历史时刻无关。当前存在误差时,比例输出一个与误差呈正比的值,当前不存在误差时,比例项输出0
- Kp越大,比例项权重越大,系统响应越快,但超调也会随之增加
- 纯比例项控制时,系统一般会存在稳态误差,Kp越大,稳态误差越小
即Kp需要我们自己调一个合适的值,太小,系统响应慢。太大,系统超调严重,甚至自激振荡。
注:自激振荡,即不外加激励信号而自行产生的恒稳和持续的振荡
PID稳态误差
系统进入稳态时,实际值和目标值存在始终一个稳定的差值
稳态误差产生的原因:纯比例项控制时,若误差为0,则比例项结果也为0.被控对象输入0时,一般会自发地向一个方向偏移,产生误差。产生误差后,误差非0,比例项负反馈调控输出,当调控输出力度和自发偏移力度相同时,系统达到稳态
判断是否会产生稳态误差:给被控对象输入0,判断被控对象会不会自发偏移
判断稳态误差的方向:给被控对象输入0,自发偏移方向即为稳态误差方向
积分项(I)
含有比例项和积分项的PID输出值:

- 积分项的输出值取决于0~t所有时刻误差的积分,与历史时刻有关。积分将历史所有时刻的误差累积,乘上积分项系数Ki后作为积分输出值
- 积分项用于弥补纯比例项产生的稳态误差,若系统持续产生误差,则积分项会不断累积误差,直到控制器产生动作,让稳态误差消失
- Ki越大,积分项权重越大,稳态误差消失越快,但系统滞后性也会随之增加
微分项(D)
含有比例项、积分项和微分项的PID输出值:

- 微分项的输出值取决于当前时刻误差变化的斜率,与当前时刻附近误差变化的趋势有关。当误差急剧变化时,微分项会负反馈输出相反的作用力,阻碍误差急剧变化
- 斜率一定程度上反映了误差未来的变化趋势,这使得微分项具有”预测未来,提前调控“的特性
- 微分项给系统增加阻尼,可以有效防止系统超调,尤其是惯性比较大的系统Kd越大,微分项权重越大,系统阻尼越大,但系统卡顿现象也会随之增加